Автомобили-роботы поедут благодаря ГИС
Автомобили без водителей перестали быть фантастикой, но для их массового распространения необходимо разработать новейшие ГИС, беспрецедентные по ситуационной осведомленности и частоте обновления информации. Какими возможностями должны обладать системы управления новым транспортом, который повезет человечество в новую роботизированную эпоху?
Технологии автоматического вождения уже широко используются в современных автомобилях. Так, разнообразные системы автоматической парковки устанавливаются на машинах разных классов, например Audi А7, Ford Focus 3, Kia Optima или Volkswagen Golf VII. Помимо этого, на некоторых современных машинах используются системы автоматического торможения и удержания траектории, а также системы следования за впереди идущим автомобилем, которые облегчают движение в потоке, в том числе на скоростных трассах.
Помимо этого, испытываются и полностью автоматические автомобили, способные двигаться без участия водителя. Первые прототипы таких машин разработки компании Google уже наездили более 1 млн км по дорогам американских штатов Невада и Калифорния, где разрешено движение машин-автоматов при условии, что у руля сидит человек, который может подстраховать робота.

Прототипы опционально пилотируемых автомобилей Google испытываются в США
В мае 2014 г. компания Google представила первый робомобиль, у которого даже нет руля и педалей, то есть эта машина может управляться исключительно в автоматическом режиме. Двухместный полностью автоматический автомобиль – это новый этап развития транспорта. Такой машиной может пользоваться, например, человек без водительского удостоверения, нетрезвый или больной пассажир.

Полностью автономный автомобиль Google без рулей и педалей. Уже начато производство первой опытной партии в 100-200 таких авто
В июле 2014 г. Великобритания объявила о том, что готовит изменения в ПДД, которые позволят машинам-роботам с января 2015 г. ездить по британским дорогам.
Автопроизводители уже вложили $100 млрд в технологии интеграции автомобилей в единое информационное пространство и создание робомобилей. А городе Анн-Арбор, штат Мичиган, даже строят небольшой городок для испытаний робомобилей. В нем будет 4 км улиц и 13 перекрестков, где радиоуправляемые и пилотируемые автомобили, а также роботы-пешеходы будут моделировать самые разные дорожные ситуации.
Над созданием машин-роботов работают ведущие мировые компании, при этом Google планирует вывести свою автономную машину на рынок к 2025 г., GM - в 2017 г., а компании Volvo, Nissan - к 2020 г.
Сканер на колесах
Современные автомобили-роботы фактически являются мобильными сканерами, которые обновляют модель окружающей среды в режиме реального времени. Возьмем, к примеру, машину Google, построенную на базе Toyota Prius. Для самостоятельного движения этот автомобиль использует видеокамеру, данные GPS и Google Street View, радиодальномер в переднем бампере и лидар, установленный на крыше.
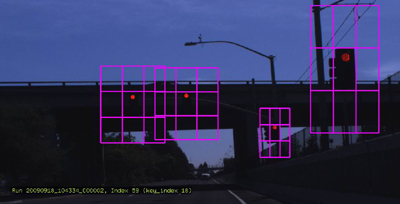
Автоматическая система Google распознает сигналы светофора
Лидар сканирует местность на 360 градусов на расстоянии до 60 м от автомобиля и в режиме реального времени строит модель окружающей среды, включая столбы, здания, пешеходов, другие автомобили и т.д. На правом зеркале машины, рядом с местом переднего пассажира, установлена видеокамера, которая с помощью сравнения наблюдаемой картины и заранее сохраненных шаблонов распознает светофоры на расстоянии до 150 м.
Все системы работают в комплексе: в движении автомобиль непрерывно определяет свои координаты с помощью GPS (точность до 15 см) и через API Google Maps фиксирует свое положение на карте местности. Благодаря этому робомобиль может реагировать на окружающую обстановку. Например, вне перекрестков машина игнорирует ложные световые пятна, похожие на огни светофора, такие как яркие стоп-сигналы грузовика на трассе.
Если сервис геопозиционирования отвечает за "стратегические" решения машины-робота, то лидар непрерывно оценивает "тактическую обстановку", то есть события в непосредственной близости от автомобиля. Лидар способен обнаружить пешехода, перебегающего дорогу, другой автомобиль, животных, разнообразные препятствия, включая повреждения дорожного полотна.
Интеграция
По расчетам Navigant Research, к 2035 г. по дорогам планеты будут передвигаться почти 95 млн робомобилей. Для сравнения, сегодня ежегодно в мире производится около 50 млн обычных машин. Внедрение машин-роботов позволит избежать 80% ДТП, происходящих по вине человека, а ведь автокатастрофы только в США каждый год наносят ущерб в $450 млрд. Прежде всего машины-роботы заменят обычные такси, при этом стоимость поездки в пересчете на километр снизится в несколько раз.

Автомобили, связанные между собой беспроводными сетями, снизят количество ДТП по вине водителей
Однако, главный эффект от массового распространения автомобилей-роботов ожидается в области геоинформационных технологий. Как мы уже выяснили, каждая машина-робот представляет собой набор высокотехнологичных сканеров, которые в режиме реального времени обновляют трехмерную модель дорожной инфраструктуры и всего, что к ней прилегает.
Новые модели машин, которые появятся в продаже к 2020 г., будут соединены между собой беспроводной связью для обмена информацией о дорожной ситуации и планируемых маневрах. Видеокамеры автотранспорта частично заменят системы видеонаблюдения на дорогах, а бортовые компьютеры самостоятельно смогут фиксировать нарушения ПДД, "договариваться" об очередности проезда перекрестка, выполнять безопасные обгоны и перестроения.
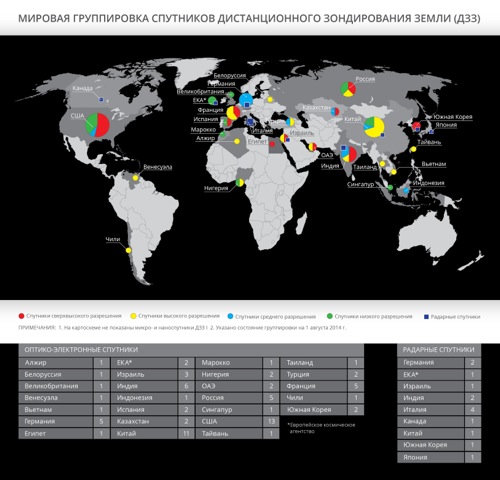
Информация, генерируемая автомобилями, будет интегрирована с данными ДЗЗ, прежде всего от миниспутников и беспилотных летательных аппаратов. Ежедневное обновление карт, необходимых для работы робомобилей, в ближайшие десятилетия станет заметной частью рынка ДЗЗ. В частности компания Google, предвидя развитие рынка в этом направлении, в июне 2014 г. приобрела за $500 млн компанию Skybox Imaging, которая занимается разработкой малых спутников ДЗЗ.
Основные направления
Компании, которые занимаются разработками в области ГИС активно включились в работу над новыми технологиями для будущего многомиллиардного рынка робомобилей.
В качестве примера можно привести канадскую компанию GeoDigital International, которая с 2008 г. занимается лидарами для трехмерного сканирования сетей линий электропередач. В июне 2014 г. компания объявила о планируемых поставках лидаров для робомобилей и разработке систем для 3D-моделирования автодорог США.
В настоящее время GeoDigital предлагает автомобильный лидар Street Mapper, который имеет 360-градусное поле зрения, точность позиционирования по GPS лучше 3 см и дальность действия 300 м. По неподтвержденным сведениям, GeoDigital активно сотрудничает с автоконцерном GM и под свой автомобильный проект получила $25 млн инвестиций.
Таким образом, для компаний-разработчиков современных систем сканирования открывается новая ниша в области автомобильного транспорта. Конкурентные преимущества получат компании, которые смогут разработать более дешевое оборудование для автоматического вождения, чем у нынешних комплектов по $10-25 тыс.
Важное направление интеграции транспорта в единое информационное пространство – программное обеспечение для обмена данными между автомобилями и ГИС. Взаимодействие между робомобилями и геоинформационными системами – одно из ключевых преимуществ автоматизированного транспорта перед современным, управляемым людьми. Непрерывный обмен данными между машинами-роботами резко снизит аварийность и одновременно в разы увеличит пропускную способность автодорог. Связанные друг с другом автомобили заблаговременно оповестят друг друга о препятствии впереди, согласуют пересечение перекрестка и рациональное распределение по полосам движения.
Несмотря на то, что именно «общение» автомобилей и их интеграция в ГИС в качестве основного источника информации принесет наибольший экономический эффект, пока развитых технологий в этой области немного. Один из примеров: совместный эксперимент компаний IBM и Bosch, в рамках которого ведущие производители программного обеспечения и автомобильного оборудования пытаются интегрировать автомобильные датчики с ГИС.
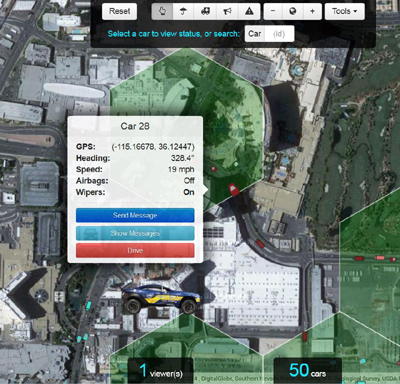
IBM и Bosch интегрируют автомобильные датчики и ГИС
В настоящее время IBM и Bosch запустили в штате Невада эксперимент с использованием 100 автомобилей, датчики которых подключены к геоинформационной системе с помощью мобильной платформы IBM Mobile First. Каждый современный автомобиль имеет около 100 микроконтроллеров и 10 млн строк программного кода. Опытная система IBM и Bosch через беспроводные сети с помощью протокола для интернет вещей MQTT передает данные с датчиков автомобилей на единую ГИС, которая в режиме реального времени обрабатывает информацию и выдает соответствующие указания.
ГИС может обнаружить экстренное торможение, срабатывание подушек безопасности и другие свидетельства аварии, а затем направить сигнал соответствующим службам. Кроме того, ГИС имеет обратную связь с автомобилем через HTML5 Worklight. С ее помощью можно предупредить водителя о том, что он въезжает на опасный обледенелый участок дороги, сообщить об аварии впереди или зоне дождя.
Весной 2014 г. компания IBM объявила о том, что система Mobile First будет использоваться на автомобилях концерна PSA Peugeot Citroen. Новая система объединит с современными ГИС-технологиями данные от автомобильных датчиков, GPS, смартфонов, светофоров и т.д.
Транспорт для всех
Прогресс в области развития единой геоинформационной среды для автомобилей-роботов также тесно связан с развитием общественного транспорта и автошаринга (краткосрочной аренды автомобиля). Так, известная автошаринговая компания Uber в мае 2014 г. заявила, что готова заменить своих водителей робомобилями Google. В результате стоимость проезда в такси-роботах впервые будет сравнима или даже ниже стоимости владения собственным автомобилем. Для Нью-Йорка стоимость поездки в роботакси будет в 8 раз ниже, чем в обычном такси с водителем.
Сегодня для управления своими такси сервис Uber использует мобильное приложение, с помощью которого пользователь может на карте видеть, где находится вызванная машина, и через сколько минут она подъедет. С распространением робомобилей резко вырастет спрос на подобные приложения, поскольку автоматический транспорт открывает огромные возможности для управления не только такси, но и собственной машиной. Например, представьте, что пока вы находитесь на своем рабочем месте, машина не просто стоит на парковке, "проедая" деньги, а самостоятельно отправляется на техобслуживание или подключается к приложению автошаринга и "подрабатывает" такси, т.е. приносит владельцу прибыль.
Также робомобиль может быть связан с медицинской геоинформационной системой и мобильным приложением, контролирующим состояние здоровья пользователя. Подобное приложение может самостоятельно направить машину в больницу, если пассажиру стало плохо. Такая импровизированная "скорая помощь" также может первой подъехать к месту происшествия и доставить пациента в клинику без необходимости ждать машину экстренных служб.
Потенциал автошаринговой технологии огромен и ограничен только фантазией разработчиков. Очевидно, что робомобили как никогда тесно интегрируют ГИС-технологии в повседневную жизнь множества людей.
Все вышеперечисленные системы, от лидаров робомобилей до автошаринга, в конечном счете будут объединены в крупные геоинформационные системы, которые не только обеспечат эффективное управление транспортной инфраструктурой, но и создадут огромное количество новых сервисов.
Прообразом такой системы можно считать приложение iRideNYC, которое начнет работу осенью 2014 г. в Нью-Йорке. Это первое в своем роде масштабное приложение, построенное на HTLM 5, которое в режиме реального времени отображает на мобильном устройстве данные обо всем городском транспорте.

Приложение iRideNYC позволяет быстро спланировать самый удобный городской маршрут
Городская транспортная система Нью-Йорка - одна из крупнейших в мире: только нью-йоркское метро за год перевозит 1,7 млрд пассажиров. Приложение iRideNYC впервые объединяет картографические данные о 9,6 тыс. км автодорог, 20 тыс. км тротуаров, информацию о стоянках 6 тыс. прокатных велосипедов, а также такси, автобусов и поездов метро.
Система в режиме реального времени показывает наличие велосипедов на стоянках, местоположение автобусов, метро, такси, автоматически подбирает варианты транзита, предлагает информацию о близлежащих достопримечательностях и мероприятиях.
Для прокладки маршрута iRideNYC использует поток данных от системы нью-йоркского метро, сервиса проката велосипедов CitiBike, ресторанного гида Yelp.com и других источников. Для создания интерактивных карт применяются продукты ERSI, Entity Framework 5.0 от Microsoft, свободная кроссплатформенная ГИС QGIS и TileMill от Mapbox. Для обработки данных в режиме реального времени в iRideNYC используется язык программирования Python 2.7 и реляционная база данных SQLite. В результате система оперативно обновляет данные на конечном устройстве- смартфоне пользователя, например, местоположение поездов метро обновляется каждые 30 сек.
Новая жизнь
Распространение автомобилей-роботов и их интеграция с новейшими геоинформационными системами изменит образ жизни многих людей. Прежде всего новая технология добавит свободного времени, которое можно потратить на отдых или работу. Также огромное пространство для развития получат геоинформационные технологии.
Согласно исследованию компании Morgan Stanley за ноябрь 2013 г., связка робомобилей и ГИС обеспечит экономию в пяти ключевых областях. В качестве примера приводятся США, где роботы-автомобили могут ежегодно экономить $1,3 трлн, из которых: $158 млрд - за счет меньших трат топлива, $488 млрд благодаря меньшему количеству ДТП, $149 млрд от уменьшения заторов, еще $507 млрд дополнительных средств экономика получит за счет возросшей производительности логистической системы.
Разумеется, страны, которые смогут реализовать возможности робомобилей и связанных с ними ГИС, получат конкурентное преимущество на рынке товаров и услуг.
Михаил Левкевич
Короткая ссылка на материал: //cnews.ru/link/a3959